工程流体力学笔记(期中部分)
B1 流体及其物理性质
连续介质假设
流体的宏观特性
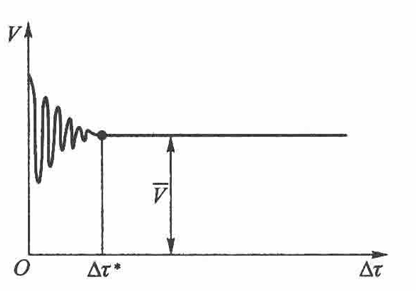
当流体团的体积过小时,平均速度呈波动状态;当体积达到临界体积时,平均速度则为确定值(统计平均)。
流体质点概念
流体质点的物理量的值:对流体质点附近,在临界体积范围内的流体进行统计平均得到
类比质点,流体质点是因为数学分析需要而假想的概念。
连续介质假设
假设流体是由连续分布的流体质点组成的物质。
流体易变形性
流体不能抵抗任何剪力作用下的剪切变形趋势(体积保持不变)。
壁面不滑移假设:流体和固体表面,可以实现分子量级的接触,达到表面不滑移。
流体黏性
流体还有带动或者阻止邻近流体运动的特性,称为流体黏性。
流体黏性的表现
相邻两层流体作相对运动时,有内摩擦作用。
由于存在内摩擦,一层流体对相对运动的另一层流体产生阻力,称为黏性切向力。
流体内摩擦本质:
- 分子内聚力(液体)
- 液体快速层通过分子内聚力带动慢速层
- 液体慢速层通过分子内聚力阻滞快速层
- 表现为内摩擦力
- 分子动量交换(气体)
- 动量交换表现为力的作用,称为表观切应力
- 气体内摩擦力以表观切应力为主
流体对固体表面具有黏附作用(壁面不滑移条件)。
牛顿黏性定律
牛顿假设:黏性切应力与两层流体间的相对速度成正比
考虑一维情况,则切应力和速度梯度成正比:
τyx=μdydu
引入角变形速率:
γ˙=dtdγ=dtdudt/dy=dydu
可改写成如下形式:
τyx=μγ˙
该式则可以推广至高维。
当 μ 为常数时,则称该流体为牛顿流体。
经测定,水和空气都是典型的牛顿流体(做题可能会用到)。
黏度
μ=γ˙τyx
单位为 Pa⋅s,常用单位为泊:1P=0.1Pa⋅s
温度对流体黏度的影响很大:
- 液体的黏度随温度升高而减小
- 气体的黏度随温度升高而增大
- 温度升高,加剧气体分子动量交换,表观切应力增大,黏度增大
压强变化对黏度几乎没什么影响。
运动黏度:黏度与密度的比值:
ν=ρμ
又称为动量扩散系数,与流动稳定性有关。
流体模型分类
无黏性流体 - 黏性流体
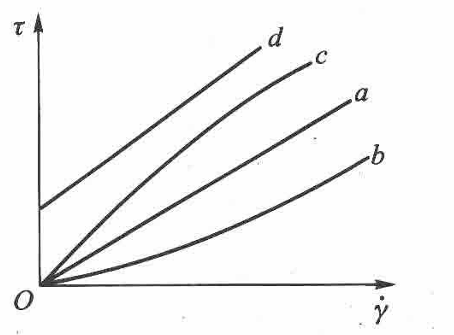
- 牛顿流体:黏度为常数(图 a)
- 非牛顿流体:黏度不是常数,考察表观黏度
- 剪切变稠流体(图 b,如淀粉糊、混凝土液)
- 剪切变稀流体(图 c,如油漆、纸浆液)
- 当切应力超过屈服应力时,流体才开始流动(图 d,如印刷油墨、牙膏)
- 时变性流体:表观黏度虽切应力作用时间而改变(血液)
可压缩流体 - 不可压缩流体
马赫数 Ma 定义:
Ma=cV
- Ma<0.3,气体密度相对变化值小于 5%,可以按不可压缩流体处理
- Ma>0.3,气体高速流动,应该考虑气体的可压缩性
B2 流动分析基础
描述流体运动的两种方法
拉格朗日法
r=r(x,y,z,t)
欧拉法
v=v(x,y,z,t)
相互转换
一般来说都是平面流场,且变量已分离或部分分离
给出了某指点的轨迹方程(拉格朗日法),用直接求时间导数的方法,可求出整个流场的速度分布式(欧拉法)
补充:一阶线性非齐次微分方程求解公式
y′+P(x)y=Q(x)
我们希望把左边凑成全微分
于是,可以两边同乘 e∫Pdx
Q(x)e∫Pdx=y′e∫Pdx+Pye∫Pdx=(ye∫Pdx)′
ye∫Pdx=∫Q(x)e∫Pdxdx+C
y=e−∫Pdx(∫Q(x)e∫Pdxdx+C)
速度场
流量与平均速度
dQ=v⋅ndA
Q=∫v⋅ndA
Q=VA
流动维度
- 三维流动:速度场必须表示成 3 个空间坐标(以及时间)的函数
- 二维流动:速度场可以简化为 2 个分量,且仅为 2 个坐标的函数
- 一维流动:速度场可以简化为 1 个分量,且该分量仅为 1 个坐标的函数
定常与不定常流动
- 定常流动:流动参数不随时间变化
- 不定常流动:流动参数随时间变化
流体运动的几何描述
迹线
某一流体质点的运动轨迹。代表了拉格朗日观点。
给定了速度场的分布,即可求出迹线方程(一般只要求二维):
udx=vdy=wdz=dt
可以写成参数方程的形式,代入初始条件即可确定方程:
⎩⎨⎧x=∫udty=∫vdtz=∫wdt
流线
某一瞬间,任意一点的切线方向为速度矢量方向的假想曲线。
给定了速度场的分布,即可求出流线方程(一般只要求二维):
udx=vdy=wdz
流线为瞬时线。对于不定常流场,每个时刻的流线都不同;但在定常流场中,流线与迹线重合。
无论是否为定常流动,流线均不相交。(奇点、驻点除外)
脉线
某一瞬间,由之前的某一时间段内,相继通过某一固定点的流体质点所连成的线。
流体线
某一瞬间标记的首尾相接的流体质点的连线。
流管、流束与总流
暂时略。
流体质点的随体导数
加速度场
a(x,y,z,t)=∂t∂v+u∂x∂v+v∂y∂v+w∂z∂v
该式有明显的物理意义:
- 第一项为当地加速度,是由某一固定点处,速度随时间变化产生的加速度
- 后面的项统称为迁移加速度,是由于速度的空间分布不均匀引起的
一维流动中,可以简化为:
as=∂t∂v+v∂s∂v
质点导数
引入场论符号(或称为随体导数符号)
DtD=∂t∂+v⋅∇
后半部分可以简单理解为:
v⋅∇=(ui^+vj^+wk^)⋅(∂x∂i^+∂y∂j^+∂x∂k^)=u∂x∂+v∂y∂+w∂z∂
可以将物理量 B(x,y,z,t)(可以是标量或矢量)的随体导数定义为:
DtDB=∂t∂B+(v⋅∇)B
由此,加速度场的公式可以简写为:
a=∂t∂v+(v⋅∇)v
一点邻域内相对运动分析
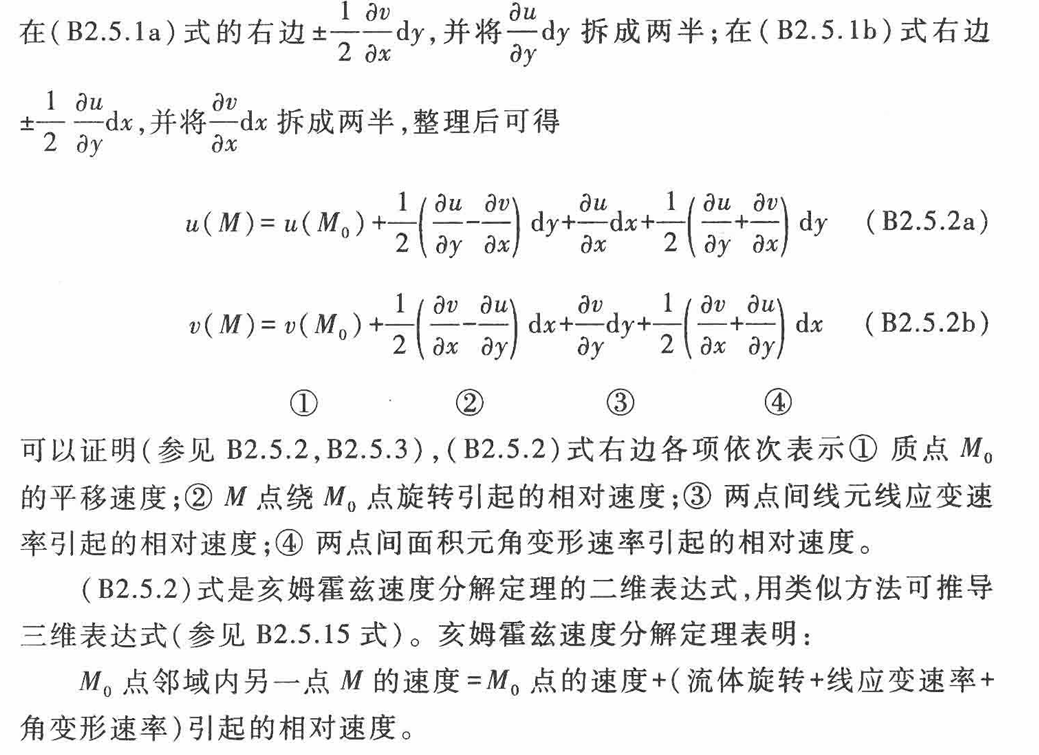
亥姆霍兹速度分解定理(二维)
{u(M)=u(M0)+∂x∂udx+∂x∂udxv(M)=v(M0)+∂x∂vdx+∂x∂udx
流体元的变形
线变形速率
- 一维:线膨胀率
- 二维:面积膨胀率
- 三维:体积膨胀率
线变形速率其物理意义也很好理解,如图:
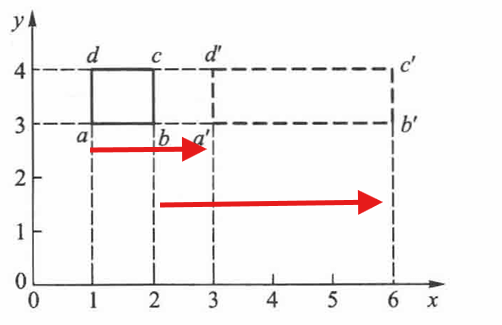
总而言之,直接用速度散度即可计算:
∇⋅v
各个方向上的线应变率为:
⎩⎨⎧εxx=∂x∂uεyy=∂x∂vεzz=∂x∂w
角变形速率
⎩⎨⎧εyz=εx=21(∂y∂w+∂z∂v)εxz=εy=21(∂x∂w+∂z∂u)εxy=εz=21(∂x∂v+∂y∂u)
流体元的旋转
ω=21∇×v
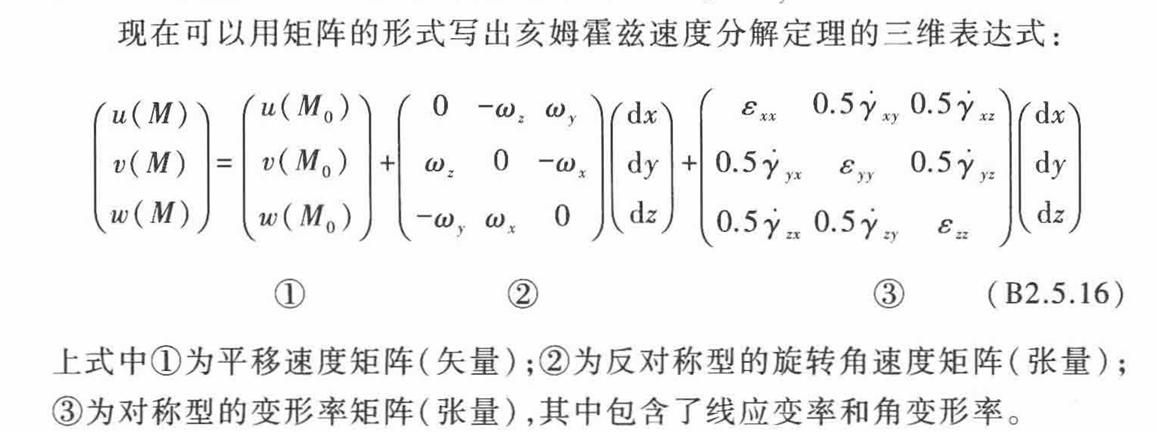
亥姆霍兹速度分解定理(三维)
几种流动分类
层流与湍流
在管道流动中阻力与速度的关系(两种流动状态):
- 低速时阻力与速度成正比,称为层流
- 高速时阻力与速度的平方成正比,称为湍流
区分这两种状态的参数为雷诺数(无量纲参数):
Re=μρVd
d 为圆管直径,V 为平均流速。
内流与外流
- 外流:流体围绕固体的流动
- 内流:流体在固体包围形成的空间内流动。
有旋流与无旋流
根据涡量 Ω 来判断:
Ω=∇×v
注意:做曲线运动的流体质点不一定是有旋流,做直线运动的流体质点不一定是无旋流。比如无限大水平放置的平板上的层流就是有旋流。判断依据是流体质点是否有自转,应当根据涡量判断。
B3 微分形式的基本方程
微分形式的质量守恒方程
取边长为 dx,dy,dz 的长方体体积元为控制体,则其体积为 dτ=dxdydz
沿 x 方向,dt 时间内流入的流体质量为 ρu⋅dtdydz
流出质量为 (ρu+∂x∂(ρu)dx)⋅dtdydz
单位时间内净流出 ∂x∂(ρu)dτ,这里我们假设流体的净流出量>0
那么,单位时间内总的净流出质量为 ∇⋅(ρv)dτ
由于有净流出,则密度变小,即 dtdρ<0
因此,该控制体内流体质量减小了 −dtdρdτ
根据质量守恒,控制体的净流出质量=控制体减少的质量,可得:
∇⋅(ρv)=−dtdρ
由散度公式 ∇⋅(ρv)=v⋅∇ρ+ρ∇⋅v 和随体导数 DtD 的定义,可得:
DtDρ+ρ∇⋅v=0
稍加改写,其物理意义会更明确:
∇⋅v=−ρ1DtDρ
流场中的一点邻域内,体积相对膨胀率=密度相对减少率
不可压缩流体
∇⋅v=0
可压缩流体的定常流动
∇⋅(ρv)=0
作用在流体元上的力
- 长程力:可以穿越空间作用在流体元上,如引力、电磁力、惯性力
- 作用在流体元上的长程力大小与流体元的体积成正比,因此又称体积力
- 由于重力、惯性力与质量成正比,有时又称质量力。
- 短程力:相邻两层流体元通过分子作用产生的力,如黏性切应力
- 在分子间距的量级上显著,随着距离增大而急剧减小
- 仅取决于流体元的表面状况,因此通常称为表面力
- 注意:表面张力好像不是表面力(可能是因为表面张力是两种液体之间,或者液体和固体之间的接触层才会存在)
注意:浮力由压强差引起,为表面力
体积力与表面力
体积力
Fb=∫ρfdτ
表面力
pn=dAdFs
流体应力场
运动流体中一点的应力状态
对于一点邻域来说,在 x,y,z 三个方向上的压强和切应力的分量是确定的;问题是:如何描述该点附近任意方向的面上的应力状态?
在该点附近取如图所示的微分六面体:
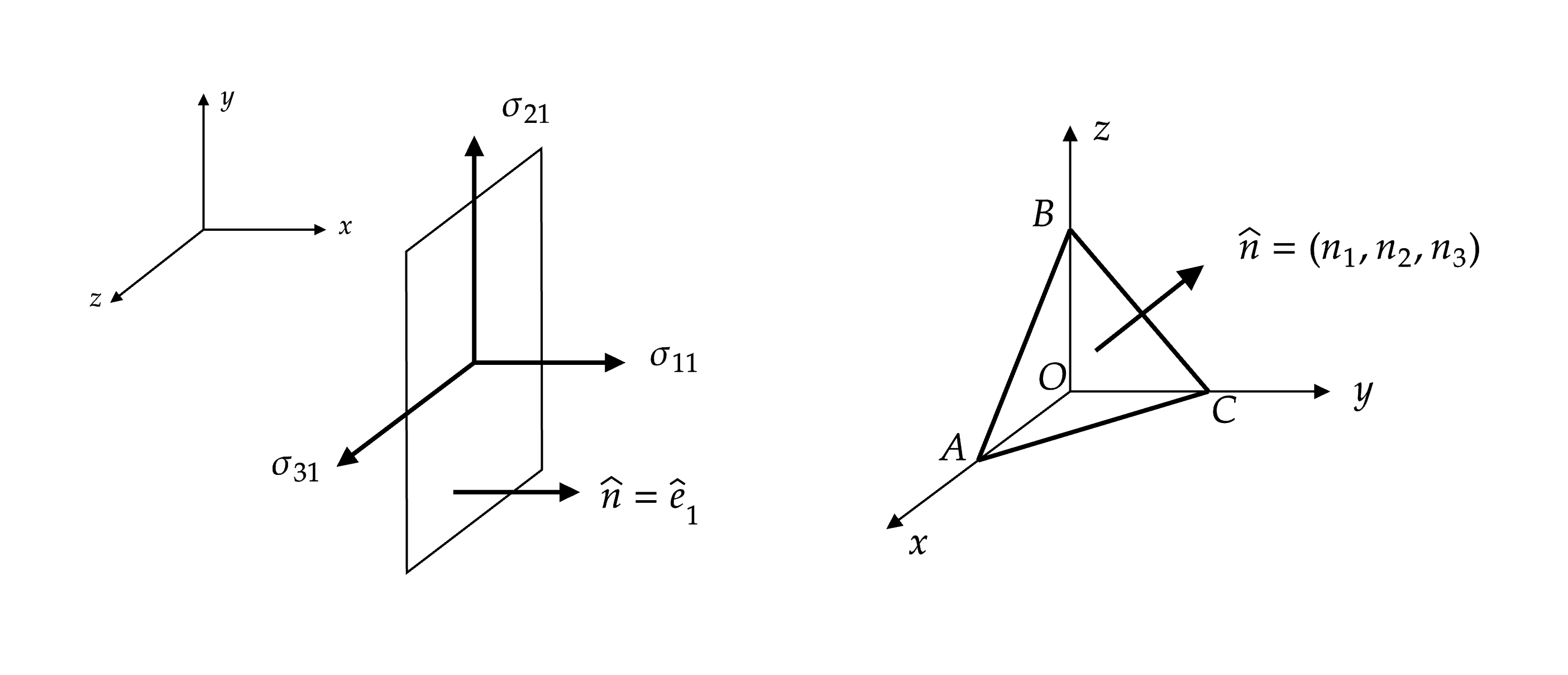
第一个下标代表压力的作用面(作用面的法向量方向),第二个下标代表压力指向的方向
考察作用在 x 方向上的正压力:
fx=pxxSx+τyxSy+τzxSz=pnxSn
同除以 Sn 可得:
pnx=nxpxx+nyτyx+nzτzx
继而可得:
⎩⎨⎧pnx=nxpxx+nyτyx+nzτzxpny=nxτxy+nypyy+nzτzypnz=nxpxz+nyτyz+nzpzz
由此可定义应力矩阵(二阶应力张量):
P=pxxτyxτzxτxypyyτzyτxzτyzpzz
这里的面元的外法矢 n=(nx,ny,nz) 应该是单位向量
pn=n⋅P=(nx,ny,nz)pxxτyxτzxτxypyyτzyτxzτyzpzz
可以简单理解为:由于是应力是压强,所以计算任意面上的总应力时,需要对面积进行投影
由此,给定了某一点的应力张量,则可以求出任意面上的应力状态
注意:可以证明,切应力分量两两相等
τxy=τyx,τxz=τzx,τyz=τzy
因此,应力矩阵是对称矩阵。
静止流体中的应力状态
P=−p000−p000−p
静止流体中,作用在一点各个方向的压应力均相等,可用一个标量,即静压强 p 来表示。
应力矩阵的常用表达式
P=−p000−p000−p+τxxτyxτzxτxyτyyτzyτxzτyzτzz
第一项为压强项;第二项为“偏应力项”或“黏性项”,纯粹由流体变形而产生,在静止时消失。
线性剪切流的应力状态:在不可压缩牛顿黏性流体的平面流动中,一点的附加法向应力与线应变率呈线性关系:
τxx=2μ∂x∂u,τyy=2μ∂y∂v
切应力为:
τxy=τyx=μ(∂x∂v+∂y∂u)
微分形式的动量方程
这部分讲得很快,稍微了解即可。
N-S 方程
对于黏度为常数的不可压缩牛顿流体时,有:
ρDtDv=ρf−∇p+μ∇2v
质量 × 加速度 (惯性力) = 体积力 + 压差力 (压强梯度)+ 黏性力 (黏性应力散度)
注意:N-S 方程在层流和湍流中均适用。
对于无黏性流体,N-S 方程退化为欧拉方程:
ρDtDv=ρf−∇p
边界条件与初始条件
边界条件
固体壁面
对于不可压缩流动,根据是否有黏性给出固体壁面上的边界条件。
- 黏性流体:满足壁面不滑移条件 v=vw
- 无黏性流体:满足无穿透条件 vn=vnw
特殊的流体边界
- 内流流场:通常给出出入口截面的速度、压强和温度条件
- 外流流场:必须给出无穷远处的速度和压强条件
两种流体交界面
常见界面:气液界面、不相溶的液液界面
界面两侧的黏性流体在界面上的速度、压强、切应力和温度应当连续。
初始条件
通常给出的初始条件时流体从静止开始的值,此时的速度、压强等参数均为常数。
当流场是定常时,无需初始条件。
特殊情况下 N-S 方程的解析解
典型案例:平行平板间的层流流动(平板泊肃叶流动)
压强场
静止流体中的压强分布
典型例子(密闭容器):
压强计示方式
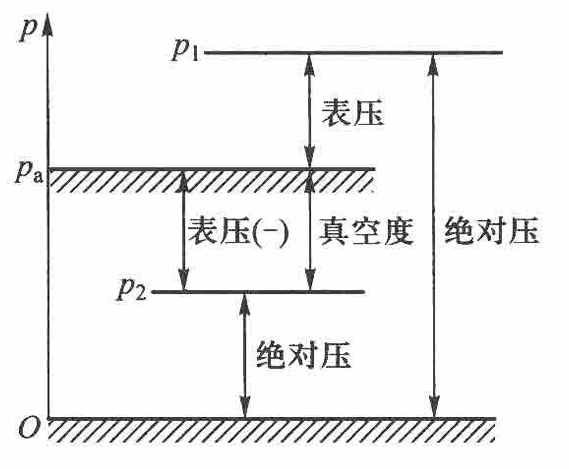
- 绝对压强 pab:以完全真空为基准
- 表压强 pg:以当地大气压 pa 为基准
- 真空压强 pv:当表压强<0(即, pab<pa )时,低于大气压部分的绝对值(因此 pv>0 )
{pg=pab−papv=pa−pab(pab<pa)
若未加指明,流体静压强均以表压强表示。
B4 积分形式的基本方程
流体系统的随体导数
概念:
- 系统 system:确定的物质的集合(拉格朗日观点)
- 控制体 control volume:确定的空间的集合(欧拉观点)
- 控制面 control surface:控制体的表面
雷诺输运公式:
DtDNsys=∂t∂∫CVηdτ+∫CSη(v⋅n)dA
积分形式的连续性方程
流体质量的空间分布量为密度:η=ρ(r,t),系统质量为:
msys=∫sysρdτ
根据质量守恒,有:
dtdmsys=dtd∫sysρdτ=0
利用输运公式可得:
∂t∂∫CVρdτ+∫CSρ(v⋅n)dA=0
控制体内的流体质量随时间的减少率 = 通过控制面,净流出控制体的质量流量
可以与微分形式的连续性方程作对比:
DtDρ+ρ∇⋅v=0
固定的控制体
由于 CV 固定,可以将偏导数移到积分号内;且直接使用绝对速度即可:
∫CV∂t∂ρdτ+∫CSρ(v⋅n)dA=0
由高斯公式:
∫CSρ(v⋅n)dA=∫CV∇⋅(ρv)dτ
带入得
∫CV[∂t∂ρdτ+∇⋅(ρv)]dτ=0
对于不可压缩流体,体积流量守恒
对于任意流体,质量流量守恒
运动的控制体
由于连续性方程不涉及惯性力,因此无论是惯性系还是非惯性系,将绝对速度改为相对速度即可:
∂t∂∫CVρdτ+∫CSρ(vr⋅n)dA=0
伯努利方程及其应用
沿流线的伯努利方程
∫∂t∂vds+2v2+gz+∫ρdp=const
对于不可压缩流体的定常流动,上式可简化为:
2v2+gz+ρp=const
动能 + 位置势能 + 压强势能=机械能 (沿流线守恒)
注意:均为能量密度
伯努利方程的限制条件较多:
应用:
- 毕托管测速
- 小孔出流(托里拆利公式及缩颈效应)
- 自由射流问题
- 三角堰流量计(出流截面上,同一高度上的流体,均视为从顶部而来的自由射流)
沿总流的伯努利方程
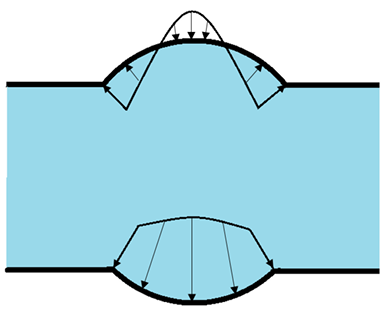
沿流线法线的速度与压强关系
gdndz+ρ1∂n∂p=Rv2
若忽略重力作用,则有
∂n∂p=Rρv2>0
这说明弯曲流线的外侧压强总是大于内侧
沿着法线积分则有
−∫Rv2dn+gz+ρp=const
当流动为直线时,R→∞,上式化为:
gz+ρp=const
或者改写为:
p=−ρgz+c
定义:将流线相互平行或接近平行直线的流束称为缓变流(反之则为急变流)
上式说明:缓变流截面上,压强分布符合静止流体中的压强分布规律
沿总流的伯努利方程
2αV2+gz+ρp=const
2α1V2+gz1+ρp1=2α2V2+gz2+ρp2
伯努利方程的水力学意义
不是重点。
沿流线:
2gv2+z+ρgp=const
沿总流:
2gαV2+z+ρgp=H=const
速度水头 + 位置水头 + 压强水头=总水头
积分形式的动量方程及其应用
取 η=ρv,流体系统动量为:
psys=∫sysρvdτ
根据牛顿第二定律,对流体系统有:
dtdpsys=dtd∫sysρvdτ=∑F
固定的控制体
流体系统的动量在控制体上的随体导数(流体系统与控制体正好重合):
dtdpsys=DtD∫sysρvdτ=∂t∂∫CVρvdτ+∫CSρv(v⋅n)dA
此时作用在流体上的合外力与作用于控制体上的合外力也正好重合:
∂t∂∫CVρvdτ+∫CSρv(v⋅n)dA=∑F
∂t∂∫CVρvdτ+∫CSρv(v⋅n)dA=∫CVρfbdτ+∫CSpndA
控制体内流体所受合外力=控制体所受合外力=流体动量随体导数
当流动为定常时:
∫CSρv(v⋅n)dA=∑F
可以简写为:
∫CSρvdQ=∑F
沿流管的定常流动
∫CSρvdQ=∫A2vdm˙−∫A1vdm˙=β2V2m2˙−β1V1m1˙
取平均速度来简化计算,β 为动量修正因子,对于湍流分布,β=1
若不做说明,可认为 β=1
质量流量一定守恒,有 m˙=m1˙=m2˙,于是可化简为
m˙(Vout−Vout)=∑F
净流出流管的动量流量=流体作用于流管上的合外力
具有多个一维出入口的控制体上的定常流动
∑(mi˙Vi)out−∑(mi˙Vi)in=∑F
关于控制体的控制面上压强的讨论:
- 对于任意形状的封闭控制面,只需要用表压强即可
- 流场中的某一点的压力方向是任意的。当表压强>0 时,压力方向垂直与控制面向内。
运动的控制体
使用相对速度即可:
∑(mr˙Vr)out−∑(mr˙Vr)in=∑F
B5 量纲分析与相似性原理
常见量纲
| 常用量 |
量纲 |
量纲 |
| 速度、加速度 |
[V]=LT−1 |
[g]=LT−2 |
| 流量、质量流量 |
[Q]=L3T−1 |
[m˙]=MT−1 |
| 密度、重度 |
[ρ]=ML−3 |
[ρg]=ML−2T−2 |
| 力、力矩 |
[F]=MLT−2 |
[L]=ML2T−2 |
| 压强、应力、弹性模量 |
[p]=[τ]=[K]=ML−1T−2 |
|
| 动力黏度、运动黏度 |
[μ]=ML−1T−1 |
[ν]=L2T−1 |
| 表面张力系数 |
[σ]=MT−2 |
|
无量纲参数
| 参数 |
公式 |
物理意义 |
名称 |
| Re |
μρVl |
黏性力惯性力 |
雷诺数 |
| Fr |
glV |
Fr2=重力惯性力 |
弗劳德数 |
| Eu |
ρV2p0 |
惯性力压力 |
欧拉数 |
| Sr |
Vωl |
迁移惯性力不定常惯性力 |
斯特劳哈尔数 |
| Ma |
cV |
Ma2=压缩力惯性力 |
马赫数 |
| We |
σρV2l |
表面张力惯性力 |
韦伯数 |
| Ne |
ρV2l2F |
惯性力外力 |
牛顿数 |